overleaf template galleryCommunity articles — Recent
Papers, presentations, reports and more, written in LaTeX and published by our community.

linear algebra using matrix
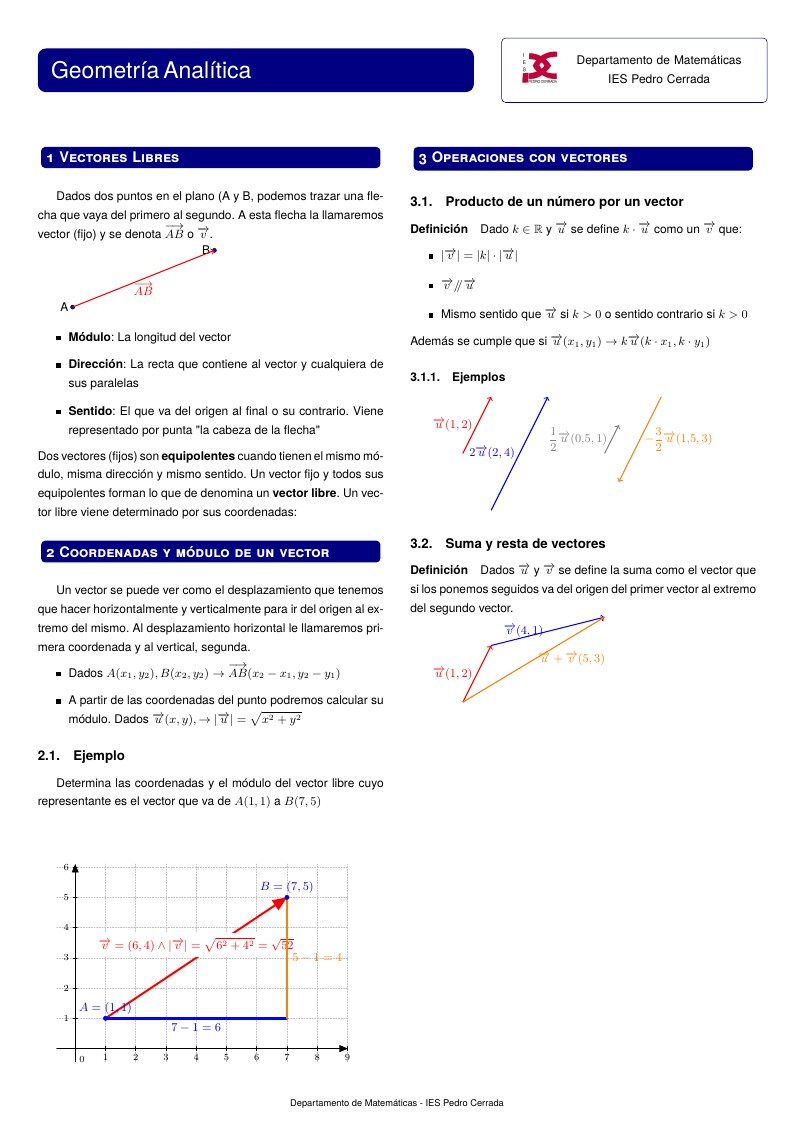
Geometría Analítica
Original: \(\mathrm{\LaTeX}\): More Than Just Academic Papers and Journals Copyright Lim Lian Tze 2011-2018 Translation to Hungarian and extension by Erika Griechisch 2018 This work is licensed under a Creative Commons Attribution-NonCommercial- ShareAlike 3.0 Unported License. As this is quite a large project with many files and packages, users on the Free plan may not be able to compile it successfully on Overleaf. If that's the case, feel free to grab the PDF here, and download the sources as a .zip for offline perusal/compilation!
We study Logarithmically Spiral Trajectories and, in particular, we look for a solution to minimize the transit time of a Spacecraft propelled by a Solar Sail, while simultaneously minimizing the area of the Solar Sail, which would allow us to carry more payload on board. We start by analyzing the forces that act on the Spacecraft taking into account that its propellant is a Solar Sail; we use the studied forces to deduce the motion equations. We then solve this motion equation with a Runge-Kutta 4 method and transform the problem of minimizing time and area to a Non-linear Optimization problem. When solving the NLP we also try to minimize the relative final speed of th spacecraft with the destination planet in order to guarantee the possibility of a safe landing on its surface. The model improves when an angle parameter α (describing the angle formed by the Solar Sail with the colliding photons) is defined as a piecewise constant function and optimized whose values are optimized in every interval to minimize transit time and Area. Using the developed model to optimize the trajectory to be followed for sending from Earth to Mars a 2000kg-spacecraft propelled by a Solar Sail, subject to the condition that at trajectory start Mars and Earth were at their closest approach, and the Arrival Relative Velocity is less than 9km/s, give us a minimal transit time of 500days and a minimal area for the Solar Sail of 183158m2, meaning that the maximal payload would be 718kg. Compared with different number of partitions of α, the optimum stays stable. This gives a solid optimal trajectory and a great result for the numerical method used. Actually, waiting until the best moment to throw the Spacecraft, id est, Mars is at 1.14 radians respectively to Earth initial position, the minimal sail area 145950 m2 and, therefore, ables to transport until 978 kg of payload with the same transit time. In addition and to conclude we tried the model to optimize the inverse trajectory.
Microscopic spatial defects (inhomogeneities) in solar cells have a detrimental impact on the overall performance of the solar cells. These defects can be due to the polycrystalline nature of the photovoltaic absorber (general case) or on the other hand, the characterization method itself can induce such inhomogeneities (ex: local excitation with confocal system). Photoluminescence imaging in particular is the most attractive type of experimental character- ization technique which has been studied by many research groups. Since it is contactless, it allows a complete analysis of the photovoltaic material and it can actually be performed at each step of the solar cell fabrication process. To properly analyze the recorded images, one has to model the transport properties. In this work we model the transport properties in 2D using both a numerical and analytic approach. First,we model the global illumination of the sample, we then analyze the effects of grains and surface recombination. Second, we study lateral transport that can be influenced by recombination at the surface (passivation issues), grain boundaries (polycrystalline cells) or local artifacts (shunts, defects...). At the same time we are able to extract the lifetime knowing the generation rate and solving the excess carrier density from our model. And finally we implement our model to extract some cell parameters like the diffusion length from experimental data through data fitting.

This is written as a learning material for high school students, but since it is in LaTeX, I submitted it to the Overleaf Gallery. A guide for answering questions asking “define” or “what is meant by”, as well as some other tricky questions.
Fill in for HW1
AME Fall '17 Senior Design
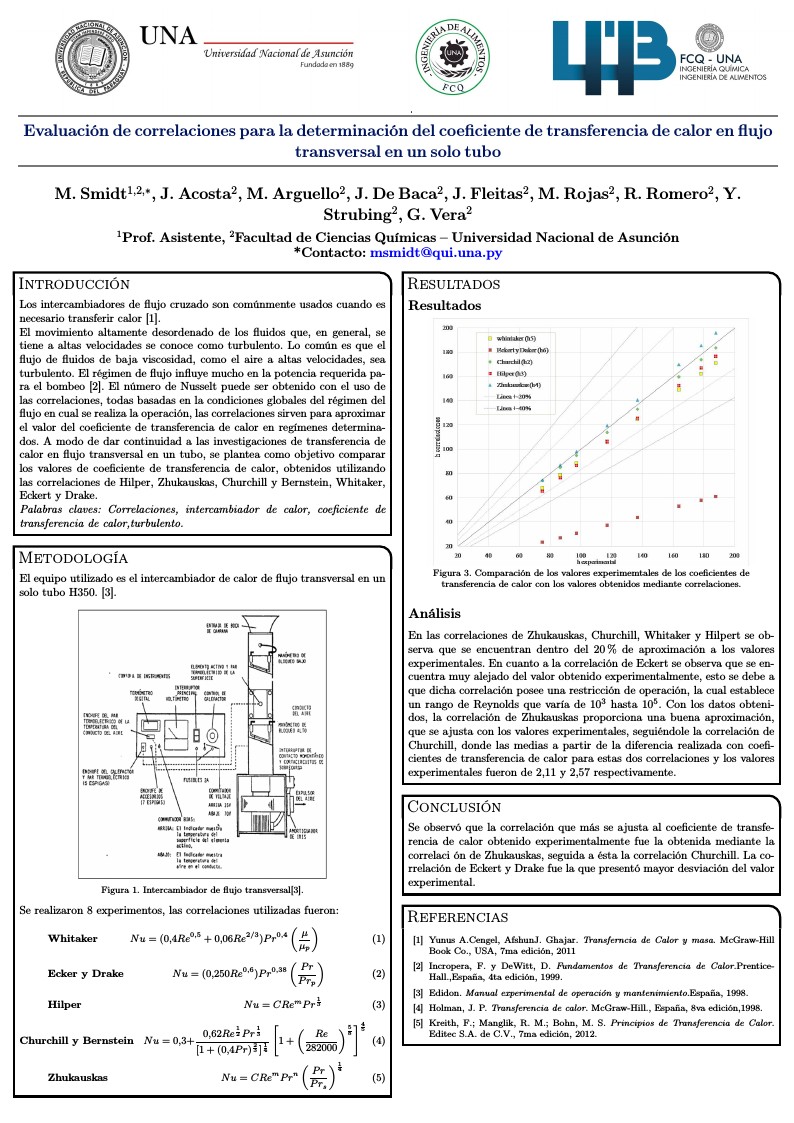
evaluacion de correlaciones para la determinacion del coeficiente de transferecia de calor en un solo tubo
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.