overleaf template galleryLaTeX templates and examples — Recent
Discover LaTeX templates and examples to help with everything from writing a journal article to using a specific LaTeX package.
Um artigo que sugere somente a compreensão dos limites, sem o uso de sua definição formal, que se desenvolve até o entendimento das operações de diferenciação.
Этот шаблон документа разработан в 2014 году Данилом Фёдоровых (danil@fedorovykh.ru) для использования в курсе «Документы и презентации в \LaTeX», записанном НИУ ВШЭ для Coursera.org: http://coursera.org/course/latex.
Template dedicated for papers published in The Electronic Journal of Applied Statistical Analysis (EJASA), an international Open Access and peer-reviewed journal. Source: EJASA webpage. This template was originally published on ShareLaTeX and subsequently moved to Overleaf in November 2019.

Thesis template for Ho Chi Minh City University of Technology
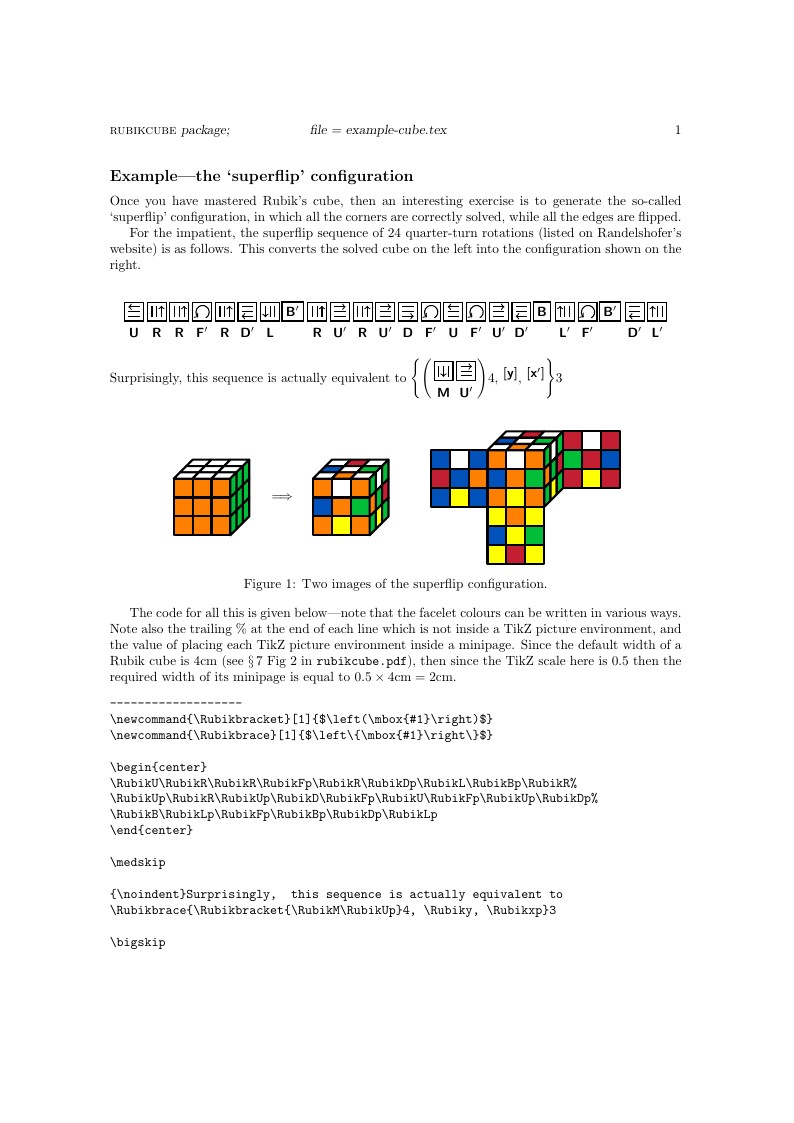
Example - the `superflip' configuration Once you have mastered Rubik's cube, then an interesting exercise is to generate the so-called `superflip' configuration, in which all the corners are correctly solved, while all the edges are flipped. For the impatient, the superflip sequence of 24 quarter-turn rotations (listed on Randelshofer's website) is as follows. This converts the solved cube on the left into the configuration shown on the right. Rubik package on CTAN: http://www.ctan.org/tex-archive/macros/latex/contrib/rubik
LaTeX template for writing student recommendations This can easily be used for anything that needs the RU letterhead.
Modelo projeto de Pesquisa apresentado ao curso de Bacharelado em Ciências da Computação, como requisito para obtenção do grau final na disciplina de Projeto Final de Curso 1. (abtex2-modelo-projeto-pesquisa.tex, v-1 PFC 1 2016 Copyright 2012-2015 by abnTeX2 group This work consists of the files abntex2-modelo-projeto-pesquisa.tex and abntex2-modelo-references.bib)
This template is for the LaTeX thesis (M.Sc. or PhD) for use at the Singapore University of Technology and Design (SUTD)
Template para o projeto de pesquisa a ser utilizado na disciplina Tópicos Especiais em Telecomunicações II da Universidade Federal do Rio Grande do Norte. As folhas de agradecimento, aprovação, ficha catalográfica estão ocultas, mas podem ser adicionadas para o trabalho de conclusão de curso.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.