LaTeX templates and examples — Two-column
Recent

A one-sided CV template with two columns, taken from https://github.com/jankapunkt/latexcv
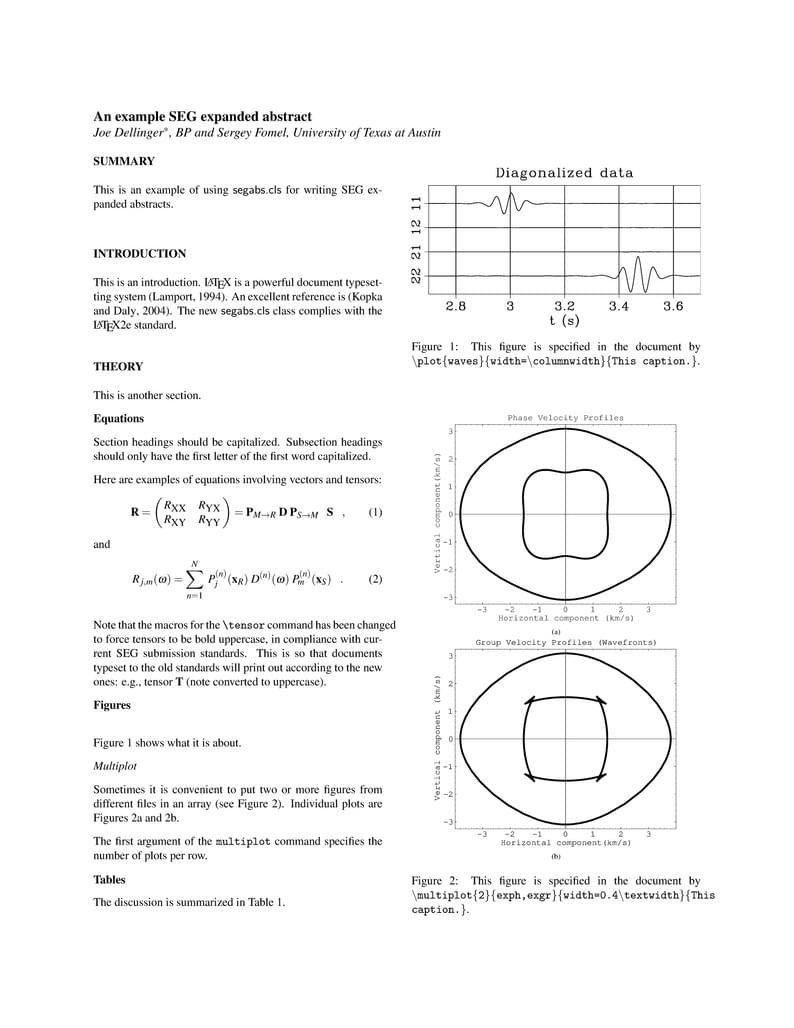
Template for writing SEG abstract.
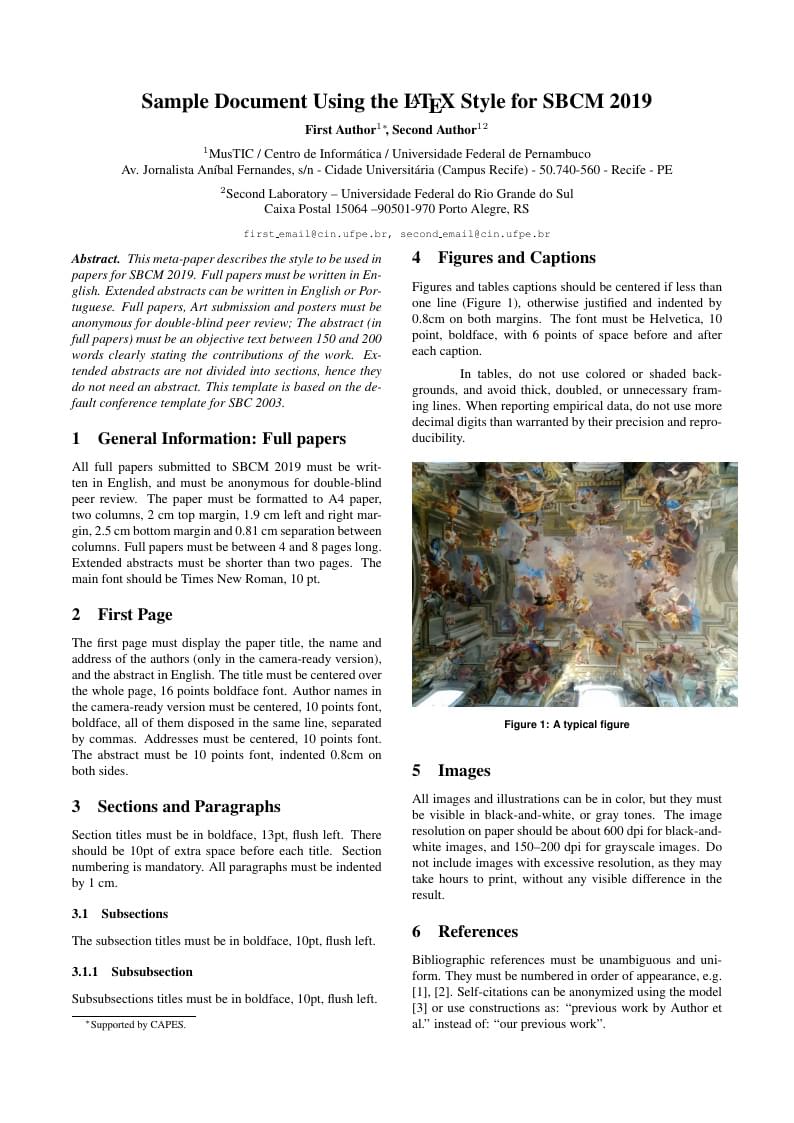
Template for the Brazilian Symposium on Computer Music 2019

A simple template used for teaching.
システム制御情報研究発表講演会(SCI)用スタイルファイル
This study aims to analyze what altmetric factors affect the success of a Kickstarter campaign. This project was created by two high school students for the Big Data Challenge.

LaTeX template for 2019 ACM/IEEE Symposium on Architectures for Networking and Communications Systems (ANCS).
Template for use in the University of Iowa course MATH:3900 Introduction to Math Research.
This document is an official template for The International Conference on Mechatronics.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.